


.png)

.png)


.png)

New Age of Terrain Classification: Proprioceptive Sensors and Uncertainty Quantification
Aug. 29, 2024.
3 mins. read.
 11 Interactions
11 Interactions
Proprioceptive sensors and uncertainty quantification methods are revolutionizing terrain classification for space exploration robots, offering more reliable navigation on uncertain and dynamic planetary surfaces.
About the Writer



The challenges of Terrain Classification
Terrain classification (TC) in rover exploration has traditionally relied on computer vision. However, the dynamic conditions of space—such as fluctuating illumination and atmospheric changes—can compromise visual sensors, affecting classification reliability. To address this, researchers are exploring the use of proprioceptive sensors, like inertial measurement units (IMUs) and motor joint states, to classify terrain. This approach aims to enhance the robustness and accuracy of rovers during extra-planetary missions by training Neural Networks (NNs) with proprioceptive data and integrating Uncertainty Quantification (UQ) techniques.
Innovations in Sensor Technology
Traditional TC research has focused on visual sensors like cameras and LADAR, but these are vulnerable to environmental conditions. Proprioceptive sensors, which measure internal states like IMUs and torque sensors, offer a more robust alternative. Recent studies have used these sensors with machine learning methods, showing promising results. However, they lacked quantifiable confidence in predictions. To address this, probabilistic UQ methods such as Monte Carlo Dropout, DropConnect, and Flipout have been integrated into DL models, enhancing their reliability for critical tasks.
Experimental Platform: The AsguardIV Rover
The AsguardIV rover, a hybrid leg-wheel rover designed for unstructured environments, was used to collect data. It features rimless wheels for better obstacle traversal and energy efficiency. Data was collected from various terrains mimicking lunar surfaces, including compact and loose sand, and rocky areas.

collect an array of data logs from trials executed across
various locations (Credit: De Lucas Álvarez et al., “Terrain Classification Enhanced With Uncertainty for Space Exploration Robots From Proprioceptive Data.”)
Data Collection and Processing
- Sensors: IMU (6-feature vector), Joint data (12-feature vector), and fused IMU-joint data (18-feature vector).
- Data Rate: 100 Hz, approximately six hours of data.
- Splits: 70% training, 30% testing, with further validation splits.
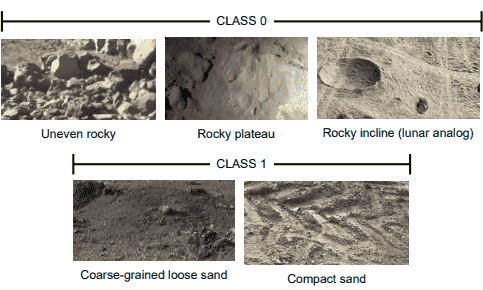
- Labelling: Terrains labelled for binary classification: rocky terrains as Class 0 (uneven and undeformable) and sand terrains as Class 1 (even and deformable).
Advanced Sequence Generation
The researchers have used the following two methods:
- Sliding Window: Extracting subsequences with predefined widths and steps.
- Sequence Subsampling: Selecting every fff-th time step to balance sample number and length.
High-Performance Neural Networks
Three NN architectures—CNN, LSTM, and CNN-LSTM—were optimized using Bayesian Optimization with Hyperband (BOHB).
Uncertainty Quantification Techniques
The researcher have integrated Three UQ techniques to enhance reliability:
- Monte Carlo Dropout (MC Dropout): Drops activations at inference time.
- DropConnect: Drops weights at inference time.
- Flipout: Uses variational inference for weight approximation.

Compelling Results
All networks were trained using Nvidia GeForce RTX 3070 and RTX 2070 graphics cards, employing the Adam optimization algorithm. The Bayesian optimizer had a maximum budget of 50 epochs. 216 BOHB studies were conducted, resulting in 6,480 full-budget candidates.
It is demonstrated as the advantage of integrating UQ techniques into TC models for exploration rovers, ensuring high-confidence outputs with low uncertainty, crucial for navigation safety in space missions. UQ-enhanced models, especially those using Monte Carlo Dropout, show superior performance and trustworthiness.
Future work will involve online testing in analogous scenarios and extending classification to more terrain types. We also aim to use multi-objective optimization techniques, incorporating entropy to generate robust and balanced models that optimise both performance and uncertainty.
Reference
Mariela De Lucas Álvarez et al., “Terrain Classification Enhanced With Uncertainty for Space Exploration Robots From Proprioceptive Data,” July 3, 2024, https://export.arxiv.org/abs/2407.03241.
Let us know your thoughts! Sign up for a Mindplex account now, join our Telegram, or follow us on Twitter.











1 Comments
One thought on “New Age of Terrain Classification: Proprioceptive Sensors and Uncertainty Quantification”
good article
🟨 😴 😡 ❌ 🤮 💩